CrossVu™ LiDAR System

Tetra Tech’s RailAI® CrossVu LiDAR system autonomously generates real-time point clouds of the rail corridor along the test car path with survey-grade accuracy.
At a glance
360º cross-plane LiDAR
Survey grade accuracy
2,400 ft. field of view
Autonomous imaging system
Track corridor feature inventory
Geo-location and assessment
CrossVu LiDAR provides survey-grade accuracy at 70 miles per hour with a 2,400-foot (ft.) field of view. All data is geo-located by the high-performance, real-time position and orientation system with accuracy to provide real-time alerts for Positive Train Control (PTC) critical assets.
CrossVu LiDAR uses dual cross-plane sensors mounted in a configuration capable of producing complete rail corridor point clouds even when the test car is coupled to other cars. Each LiDAR sensor has a proprietary autonomously‑controlled protective enclosure that opens and closes based on train movement and climatic conditions, and provides proper operating temperature and dust protection via a conditioned forced air system. A high‑performance processor generates the real‑time point cloud using the LAS file format and interprets features and events of interest (based on client‑business rules). Real‑time LAS point clouds are archived onto the network-attached storage (NAS). The raw and post‑processed trajectory and LiDAR sensor data are archived for back-office‑based reprocessing and analysis.
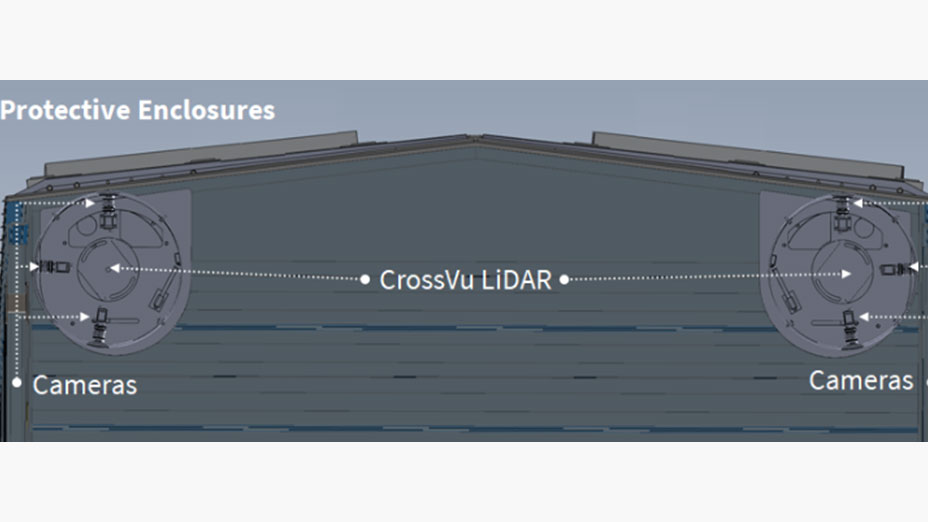
RailAI’s CrossVu LiDAR includes Tetra Tech’s PanVuTM autonomous imaging system (AIS), which comprises six high-resolution cameras producing a 360-degree panoramic, ribbon digital image.
Images captured during surveys allow point clouds to be colorized and provide a visual assessment of the site conditions at the point and time of survey. Images are archived onto the NAS. Images acquired from the AIS can resolve text with a font height of 2 inches at a distance ranging from 6 ft. to 50 ft. Images are accurately time-stamped to allow georeferencing or colorizing the LiDAR point cloud. Each of the cameras is housed in the protective LiDAR enclosure.
The CrossVu LiDAR System Provides the Following Measurements and Other Data
The CrossVu LiDAR system inventories and precisely locates signage, crossings, wayside equipment, culverts, tunnels, vegetation, and other clearances; track features; and adjoining track. Detecting and geopositioning adjoining track provide the RailAI system with real-time current position awareness of which track the car is currently occupying (imperative for correct business rule application). Real-time LiDAR point cloud generation supports the continuous three-dimensional, right-of-way clearance measurements and alerts as well as the assessment of roadway crossing sight distances (which can impact vegetation management programs and regulatory reporting).
Multiple passes of the CrossVu LiDAR system help detect changes and the precise location of assets, including PTC critical signage, turnouts, and crossings, as well as track and other features. Real-time alerts can be sent to report PTC critical asset survey failures.
In conjunction with RailAI’s 3DTAS, the CrossVu LiDAR system evaluates the ballast profile and identifies ballast deficiencies, surplus ballast, and loose ballast around ties. This allows real-time alerts for shy ballast and other conditions, as well as more accurate planning of ballast requirements for capital programs.
Clients can use the CrossVu LiDAR system’s point cloud data to evaluate the profile and slopes of longitudinal drainage ditches and identify areas requiring maintenance. Multiple passes can provide validation of ditch maintenance work.
Multiple passes of the CrossVu LiDAR system can measure movement and changes in embankments and tunnel walls, helping identify features that warrant follow-up geotechnical assessment.
The CrossVu LiDAR system identifies areas that require vegetation management, and subsequent passes validate the effectiveness of vegetation management work.
Crossing sight-distance maps can be readily constructed from the CrossVu LiDAR data to improve crossing safety and support an investigation in the event of an incident or accident.